Montag, 18.07. - Sonntag, 24.07.2005
Dieses mal luschern wir in die technische Ecke und schauen dem Team um Gerrit auf die Finger. Da ich mir nicht ganz sicher bin, ob ich nicht zu viel verrate, werde ich mich direkt im Anschluss an diesen Wochenbericht erst mal aus dem Staube machen (böse Zungen werden jetzt behaupten, ich würde zur Strafe deportiert werden ;-) oder hätte Angst vor Gerrist "Wutanfall").
Wie dem auch sein, ich werde mal schauen, ob wir den Dänischen Strand wirklich gut getroffen haben. Für alle, die jetzt voller Panik nach der Baldrian-Flasche greifen: Nein, ich bin zwar 14 Tage weg, aber der nächste WB ist schon fertig und wird von Josie zu gegebener Zeit aktiviert werden (so sie den richtigen Button findet ;-).

Aus unserem Elektronik-Labor: Hier ein paar Bilder mit unseren neuen SMD-Lötofen! Und um zu erklären, wie so ein Gerät funktioniert, schauen wir einfach mal zu, wie das ganze funktioniert...
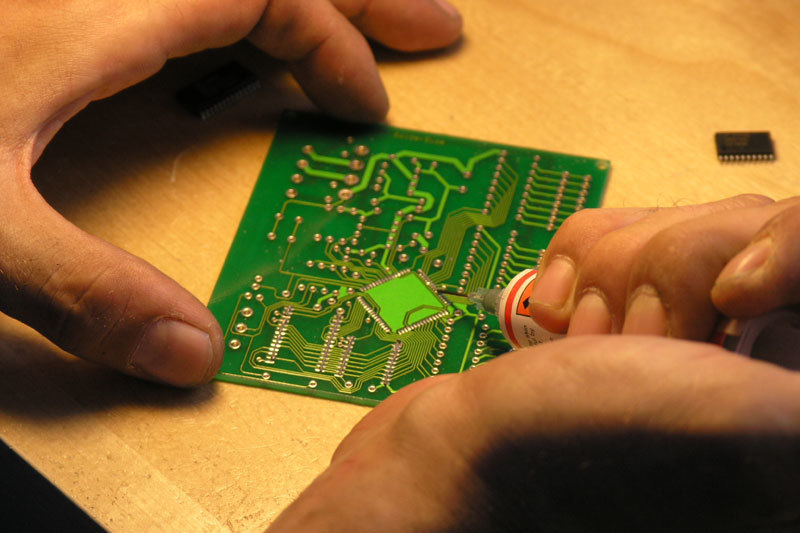
Mitarbeiter Axel O.
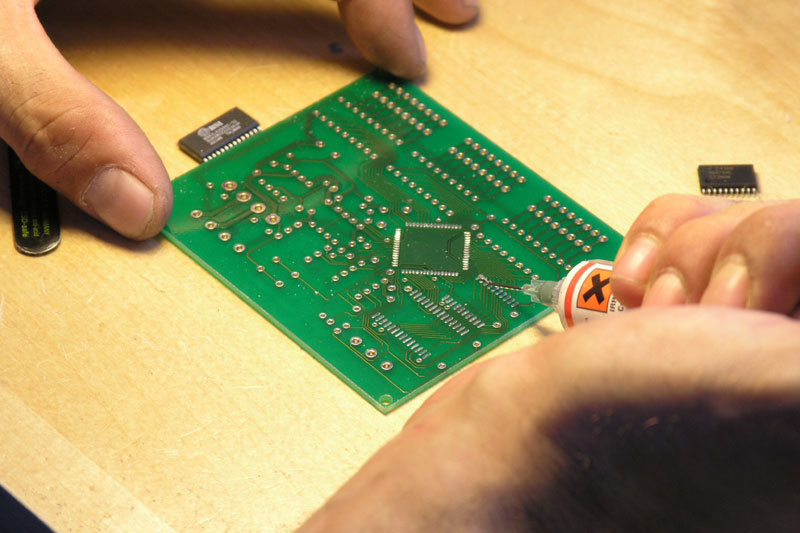
trägt die SMD-Lötpaste auf die Platine auf.
Für unsere internen Entwicklungen ätzen wir die Platinen selbst
in diesem Falle ist jedoch eine gefertigte Platine zu sehen.
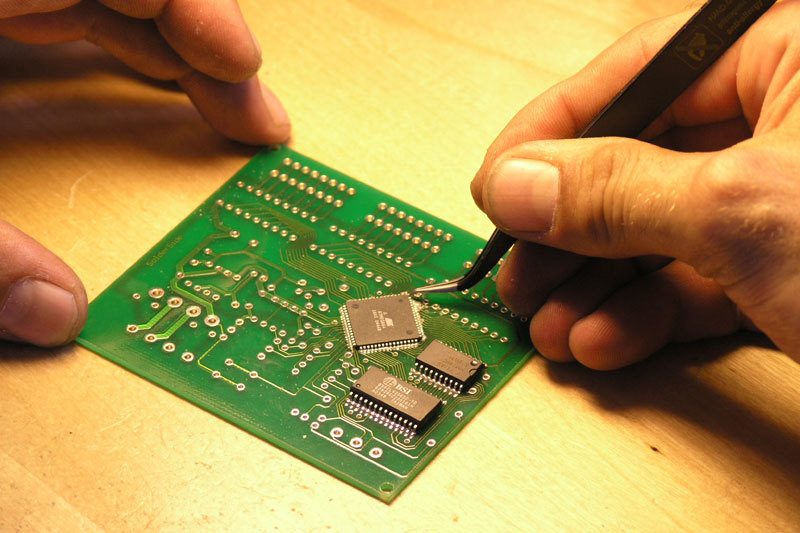
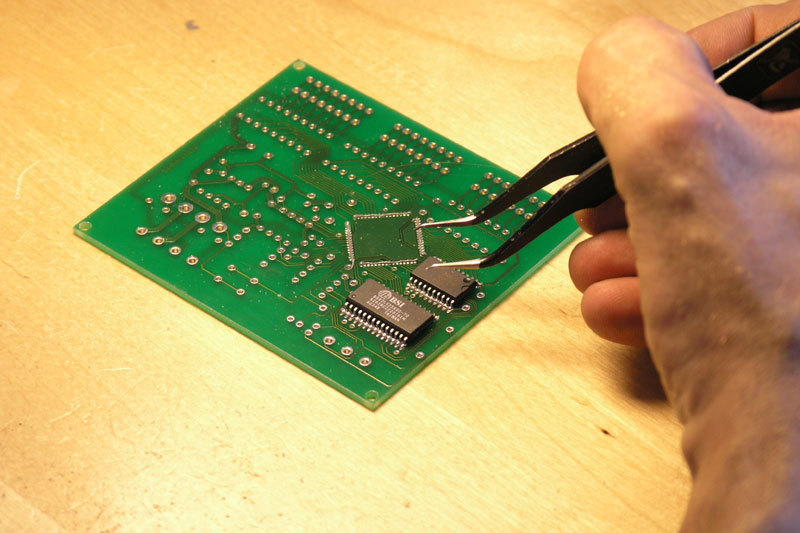
Dann werden ein Mikrocontroller, das externe RAM und ein Logikbaustein platziert.

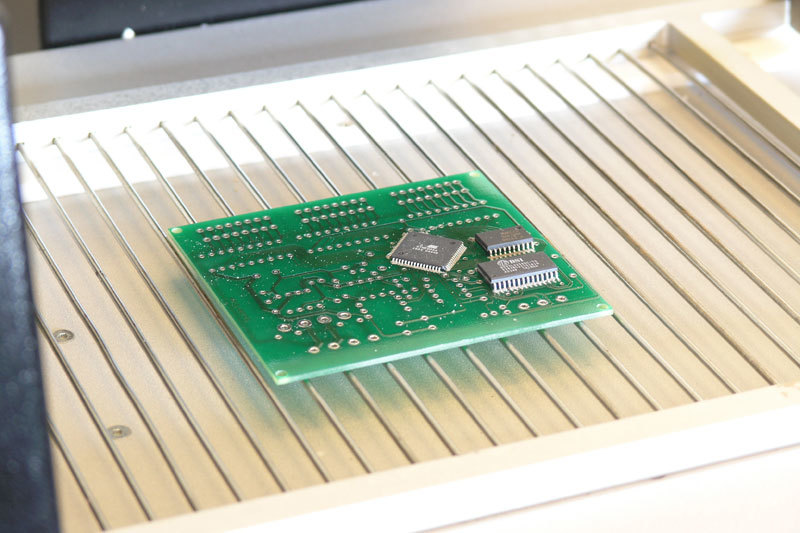
Die Platine liegt bereit um im Ofen gelötet zu werden.
Der Lötvorgang im Ofen: Die Platine wird mit kurz- und langwelligen Infrarot Licht erhitzt.
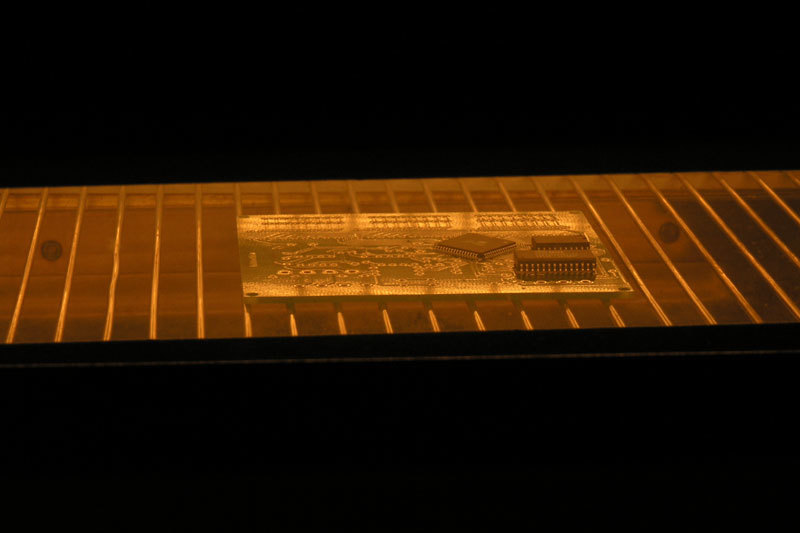
Und voila, nach nicht einmal einer Minute die Platine ist fertig gelötet.
Auch die Steuerung des Schwimmdocks übernimmt eine von uns entwickelte Schaltung. Dazu wertet der Mikrocontroller die Daten von einem ZENSIERT aus, und steuert mit hilfe von ZENSIERT die ZENSIERT.
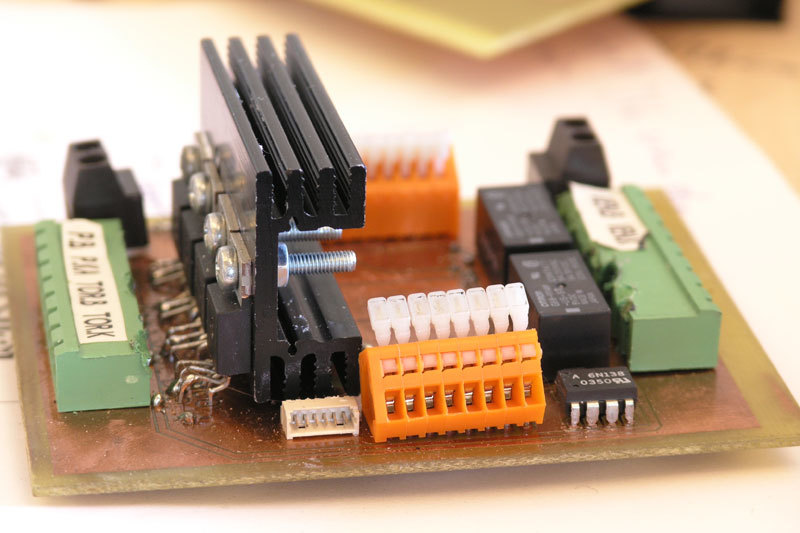
Vom Becken zum Kanal, eine Fahrt durch die Schleuse. Die Schleuse verbindet das Becken mit dem Kanal im MiWula und gleicht dabei abhängig von der Tide (Ebbe und Flut) einen Höhenunterschied von 12 - 16 cm (entspricht 10-14m in der Welt da draußen). Gesteuert wird die Schleuse über eine Elektronik die über 6 Magnetschalter (Reed-Schalter) den aktuellen Status ermittelt. Diese sind Tor zum Kanal auf oder zu, Tor zum Becken auf oder zu und ob die Schleuse voll oder leer ist. Angesteuert wird damit je ein Motor zum öffnen und Schließen des Tors zum Becken und zum Kanal, je ein Magnetventil und eine Pumpe zum füllen und zum ablassen der Schleuse. Daraus ergeben sich lediglich 7 zulässige Zustände (nachfolgend farbig hervorgehoben), alle anderen Zustände führen zum sofortigen abschalten aller Komponenten. Um dies zu verdeutlichen machen wir jetzt eine Fahrt durch die Schleuse, vom Becken zum Kanal. Das Tor ist offen und der Kanal ist leer (1), wir sind reingefahren und jetzt gibt Gerrit das Signal rauf zum Kanal. Das Tor zum Becken schließt sich (2), wenig später ist das Tor zum Becken zu (3), Ventil und Pumpe vom Kanal werden aktiviert. Die Schleuse füllt sich langsam und ist jetzt ersteinmal nicht mehr leer (4), erst oben angekommen mit der Meldung Schleuse voll (5), öffnet sich das Tor zum Kanal (6), als das Tor zum Kanal offen (7) ist, erwartet uns auch schon das nächste Abenteuer, unter der Eisenbahnbrücke vor uns kommen wir nie unter durch. Der Kapitän beruhigt uns und erklärt das es sich dabei um eine Klappbrücke handelt. Aber zurück zur Schleuse, auf Besonderheiten (z.B. Nachlaufzeiten der Ventile gegenüber den Pumpen oder der Motoren für die Schleusentore, um ein festes schließen zu garantieren, sowie die PWM-ansteuerung um eine realistische Geschwindigkeit der Tor-Motoren simulieren, wird hier nicht näher eingegangen. Beim befüllen der Schleuse wird das Ventil und die Pumpe(zum schnelleren füllen) eingeschaltet und gleichzeitig das Ventil und die Pumpe zum Becken abgeschaltet. Diese könnten noch laufen, weil es sich Gerrit mittendrin anders überlegt (was häufig der Fall ist) und er statt runter plötzlich wieder rauf will. Da dies eine sehr einfache Steuerung ist (im Verhältnis zur Schiffsnavigation die in ihrer Endversion mit über 350 Mikroprozessoren ausgestattet sein wird), bezeichnet Gerrit im Eifer des Gefechts solche Nebenentwicklungen oft liebevoll als Abfallprodukt.
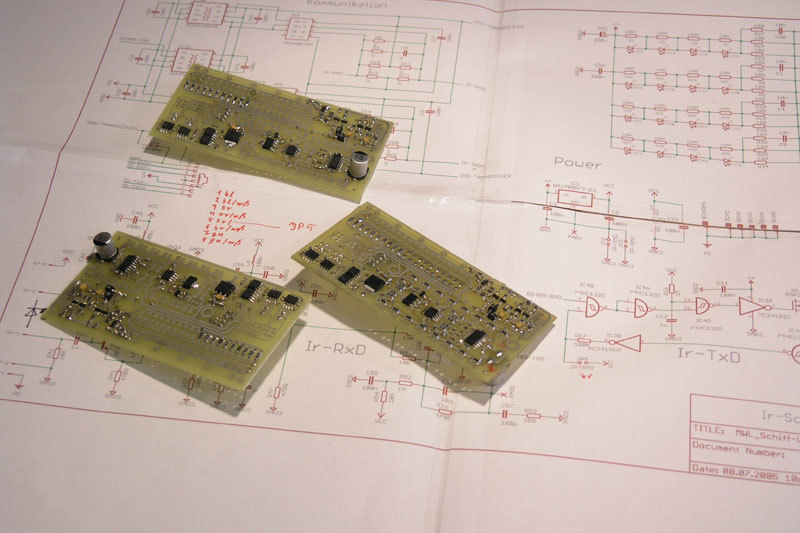
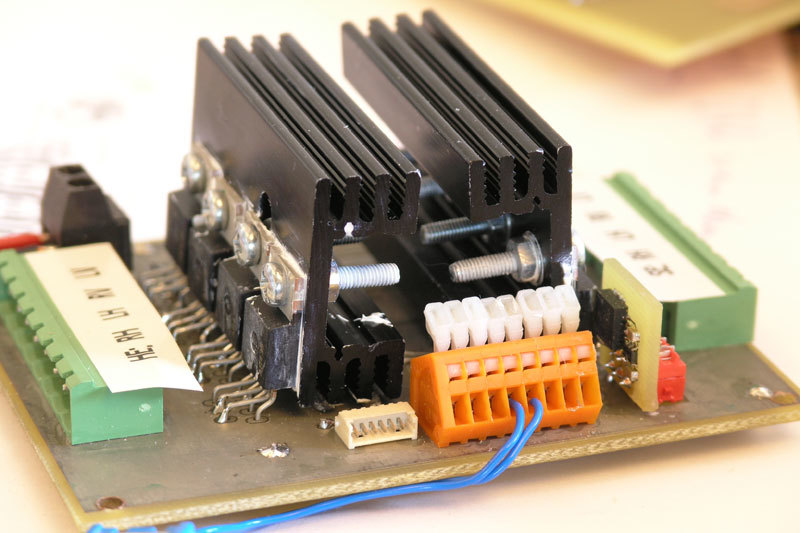
Und hier noch ein Blick auf die Steuermodule für die Autofähre, damit das Carsystem auch auf der Autofähre funktioniert. Die speziellen Module verwenden Infrarot-Steuerung.

Und hier ein ganz besonderes Schmankerl: Ein Screenshoot der Schiffssteuerung im Bereich der Schleuse: Schön zu sehen sind die berechneten Schiffsfahrwege (rote Punktelinie) auf den vorkonfigurierten Fahrwegen (gelbe Pfeile). Innerhalb der Schleuse sind die Liegepositionen zu erkennen (gelb = belegt, grün = frei).Virtuelle Bojen (rot) dienen als Anker für die Fahrwegs-Abschnitte und blaue markieren die möglichen Ausweichpositionen bei Gegenverkehr.
